Swiss Researchers Develop Detachable Robotic Hand with Crawling Capability
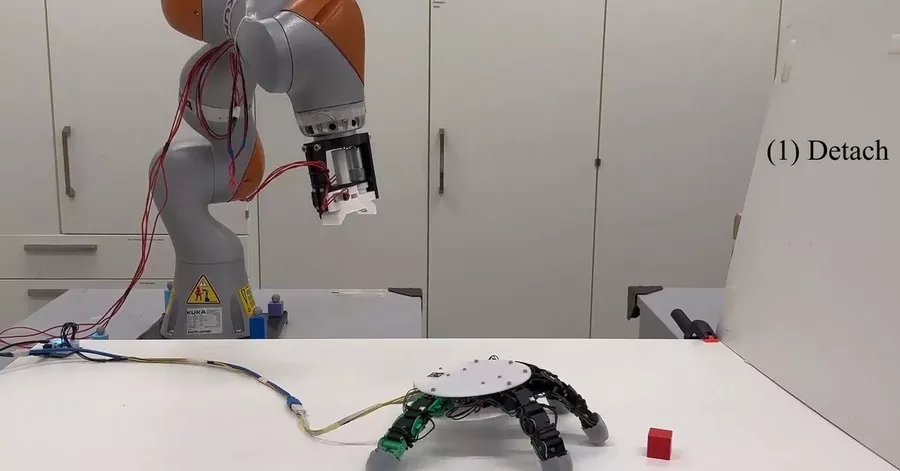
In a groundbreaking development, researchers from the École polytechnique fédérale de Lausanne (EPFL) in Switzerland have created an innovative robotic hand that can detach from a robotic arm and crawl independently. This advancement, presented at the International Conference on Robotics and Automation (ICRA), was recently reported by IEEE Spectrum magazine.
The new design addresses a longstanding limitation in robotics, where traditional robotic arms are typically fixed to structures for stability, restricting their reach. The EPFL team’s goal was to develop a bimodal robotic hand with enhanced grasping capabilities and the ability to operate independently from the robotic arm when necessary.
The hand’s unique design allows it to detach and reattach to a robot arm as needed, thanks to a magnetic connector at the wrist. To optimize the design, researchers employed a genetic algorithm and the MuJoCo physics simulator. The resulting prototype features five articulated fingers, closely mimicking the human hand structure.
One of the most notable features of this robotic hand is its ability to bend its fingers in both directions, enabling it to crawl and grasp objects with unprecedented versatility. This design allows the hand to lift multiple objects simultaneously without repositioning the arm, significantly expanding its usefulness when attached to a robotic arm.
While smaller than some existing robotic systems like Boston Dynamics’ Spot, which uses four legs for locomotion, this detachable hand could potentially enhance the capabilities of such robots. For instance, it could improve a robot’s ability to explore or analyze confined spaces that are currently inaccessible to larger robotic components.
This development represents a significant step forward in robotic design, potentially opening up new applications in fields ranging from industrial automation to search and rescue operations. As research continues, the implications of this detachable, crawling robotic hand could reshape the future of robotics and human-machine interaction.

 By
By
 By
By
 By
By
 By
By
 By
By
 By
By
 By
By