

AI-Powered Robot Arms Learn to Clean Spills in Just Four Days
In a groundbreaking development, researchers from UC Berkeley and ETH Zurich have successfully trained inexpensive robot arms to clean spills using OpenAI’s GPT-4 language model. This innovative project, completed in just four days, demonstrates the potential of AI language models in performing non-language tasks.
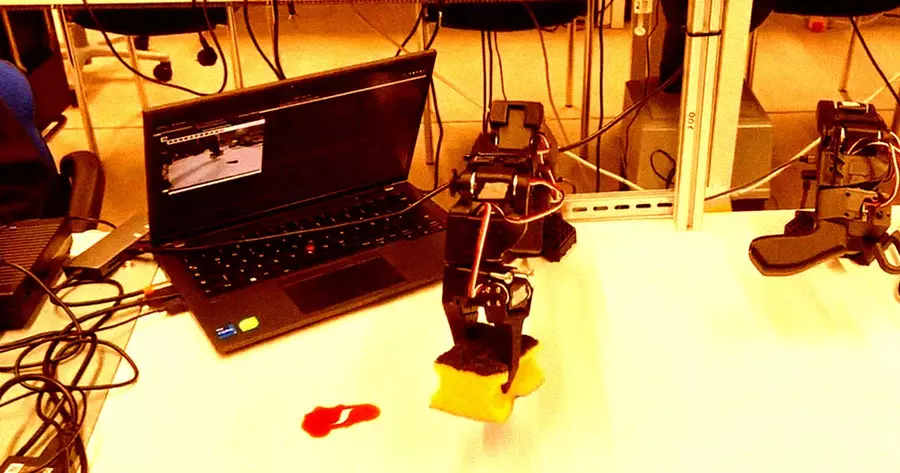
UC Berkeley roboticist Jannik Grothusen showcased the robot’s capabilities in a video, where the arm can be seen identifying and cleaning a spill upon command. The robot arms were trained using approximately 100 demonstrations and a regular sponge.
One of the most notable aspects of this project is its accessibility. The robot arms are fully open source, allowing for home assembly with guidance from a YouTube playlist. This approach significantly reduces costs and democratizes robotics technology.
The researchers utilized LangChain, a context-aware “multimode agent,” to translate the language model’s input and output into robot movements through reinforcement training. Grothusen described the experiment as a “proof-of-concept” for a robot control architecture that integrates a visual language model for human-robot interaction and reasoning.
While the potential for developing a fully functional cleaning robot for home use remains uncertain, this experiment highlights the broader trend of making robotics more accessible through open-source initiatives.
In related developments, an analyst recently confirmed that Tesla’s robots are being remotely controlled, further illustrating the ongoing advancements in the field of robotics and AI.
As AI and robotics continue to evolve, projects like this underscore the rapid progress being made in integrating language models with physical tasks, potentially revolutionizing various industries and everyday applications.

 By
By
 By
By
 By
By
 By
By

 By
By
 By
By

 By
By










